毎回、放置気味のBlogですが。。。w
今回はTAMIYAのカムプログラムロボットをMicro:Bitを使って動かしてみました!
必要なのは、TAMIYAのカムプログラムロボットと!!

Micro:bitが2個必要です♪
私はChibi:bit(Micro:bit互換機)を2個使用しました!!

その他に、KitronikのLine Following Buggy for the BBC micro:bitについてきた、モータードライバーを使用しました。

さっそく組立てです。
カムプログラムロボットのカム機構の箇所は不要になりますので、全て取り払います。
そして、モータードライバーにDCモーターを接続し、カムプログラムロボットに搭載します。
モータードライバーがカムプログラムロボットの体の部分と干渉するため、自分はニッパーで干渉する部分を切り取りました。
こんな感じです!w



プログラムは2つ作ります。
コントローラー側のプログラムと、ロボット側のプログラムです。
まずはコントローラー側のプログラム。
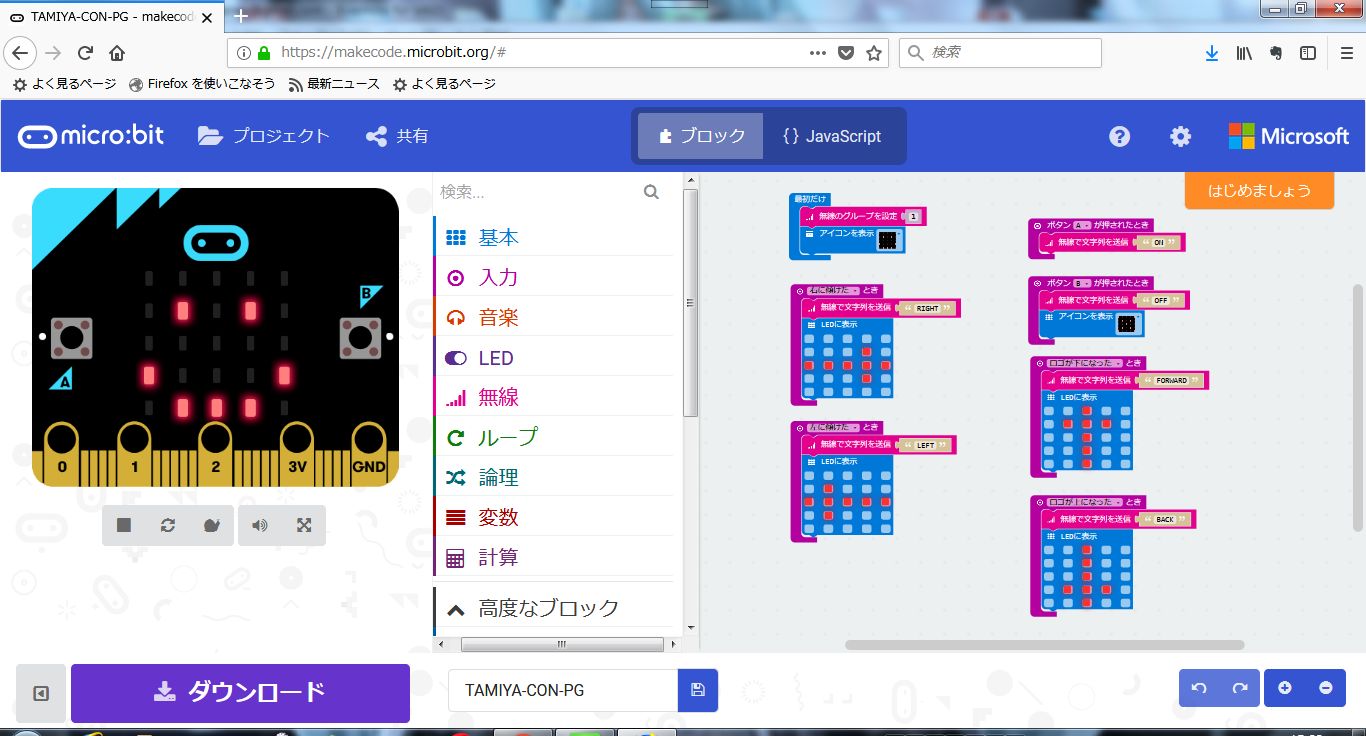
そしてロボット側のプログラム。

モータードライバーの追加は『パッケージを追加する』の所から、『motor』で検索するとKitronikのモータードライバーが追加できます。

っで、それぞれのプログラムをMicro:bitに書き込むと。。。
手がプルプルしてるのは、カメラで撮るのに。。。www

直感的に操作できて楽しいです♪
今度は、音声合成LSI ATP3012R5-PUを追加して喋らせて見ようと思います♪
でわでわ(( ヽ(o^ー゜)フリフリ
0 件のコメント:
コメントを投稿