すっかり秋めいてまいりました東京です!!
朝晩の通勤時間にはジャケットを着ていないと風邪を引いてしまいそうですね!!
さてさて、この手のBlogは本来別の場所で書いていたのですが転職をしましたので。。。www
でも引き続きロボットやプログラミングクラブといったものには力を入れて行きますよ~
今回作ってみたロボットは~?

はい!!これ!!
Kitronikの:MOVE miniです!!

中身はこんな感じ!!
Kitronikの割には、きちんとした外箱でビックリ(゚д゚)!ですよ!!

まずは、Micro:bitとmicro:bit用 Servo:Liteを取り付けます。

スペーサを忘れずに。
それとネジをキツク締め込むと壊れてしまいますので、ほどほどに。

単4電池を3本セットします。

micro:bit用 Servo:LiteのスイッチはOFFにしておきましょう。

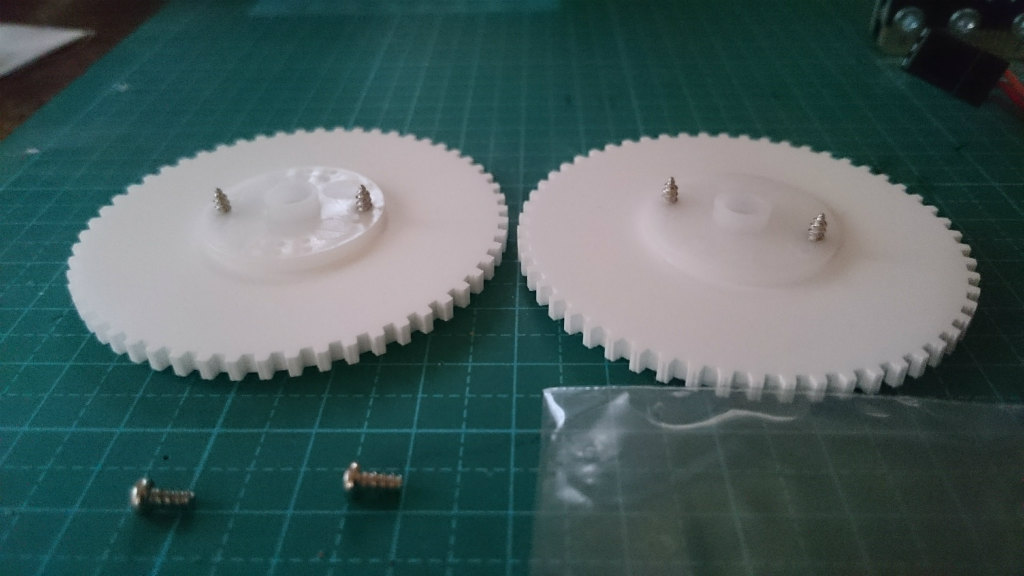
次はタイヤの取り付けです。
サーボとサーボホーン、タイヤをネジで止めます!

っで、このネジですが。。。
これって明らかに設計不良?なのか?

ネジの先端が危険ですね。。。
それにネジを締め込むのに結構力がいるので、ネジ頭をナメないように気を付けましょう。
タイヤをサーボに取り付けたら、micro:bit用 Servo:Liteにサーボを接続します。
茶色い(GND)が上に来るように接続します。

次にウェブブラウザを起動し、Micro:bitのホームページにアクセスします。

『プログラムしましょう』をクリックします。

Java Scriptブロックエディターにある『プログラムしましょう』をクリックします。

プログラムエディターが起動します。

簡単なプログラムを作成し、Micro:bitへ書き込みます。
プログラムを書き込みサーボが回転することを確認します。

次にサーボモータをシャーシに固定します。

サーボモータの耳をシャーシに『パチン!』とハメ込みます!

次に縦のプレートを止めます。

この時に忘れてしまったのですが、ネジで止めるようになっているので、忘れないように気を付けてくださいね。

縦のプレートを繋ぐプレートをハメます。
アーチ型になっている方が後ろになります。

私はこのようにサーボモータのケーブルを通しました。

次に外枠を取り付けていきます。

マニュアルにはこのようにしてから・・・
とあるのですが、マニュアル通りに作ると上手くハマりません。

なので私は、ナットを先にシャーシ側にセットしてからネジで固定しました。

こんな感じです!!w

前から見たところ。

次にタイヤを取り付けます。

はい!!取り付け完了です!!w

横から見た時。

micro:bit用 Servo:Liteとサーボモータのケーブルを縦のプレートの間を通すようにセットすると、コネクタが干渉せずにセットできました。

こんな感じです。

最後に:MOVEのプレートを取り付けたら完成です!!

横から。

後ろから

う~ん。中々です!!
今度はプログラムを作って遊んで見ようと思います!!
でわでわ(( ヽ(o^ー゜)フリフリ
0 件のコメント:
コメントを投稿